



Versión de potencia de la luz de cortesía con LEDs para casa, que enciende una tira de leds o una lámpara por un período de tiempo determinado, cuando apagamos la luz de la habitación.

Proyecto completo para la construcción de un semáforo con transistores que controla tiras de leds de 12V de buena potencia.

He construido este sistema para una muestra en la que se trata de antiguos métodos de comunicación (morse, semáforo, display alfanumérico)

Queridos lectores, he decidido de tomarme unas vacaciones. Mi presencia en la red no se interrumpe, solo cambia. Pienso que en este momento sea más útil trabajar a nivel de comunidad local, con gente del lugar donde vivo. El nuevo sitio se llama ibridazioni.it

Estamos llegando al final de este año y como de costumbre escribo mi tradicional saludo para las fiestas. Este año he celebrado los 15 años de Inventable, que…

Ha concluido el Festival de Ciencias 2025 de Génova y EnergiLab estuvo presente en un lugar maravilloso: la vidriera de la «Piazza delle Feste», en el «Porto Antico» de Génova.
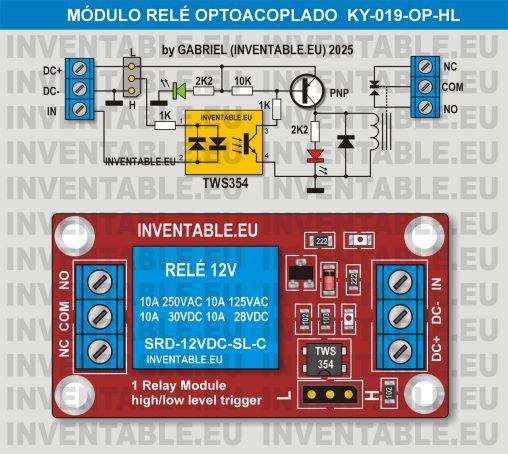
En este post veremos el módulo relé optoacoplado KY-019-OP-HL, que permite trabajar con lógica positiva o con lógica negativa. Explicaré como está hecho y como se utiliza, con algunos ejemplos de conexión.

Quince años atrás nacía Inventable, inicialmente un blog personal que con el tiempo se convirtió en un importante proyecto didáctico.

En este post veremos el proyecto de un sistema automático de control de temperatura muy simple que usa un ventilador y muy pocos componentes.

Fichas técnicas y ejemplo de aplicación como adaptador de niveles lógicos de los MOSFET de baja potencia 2N7000 y BS170, con sus respectivas versiones SMD 2N7002 y MMBF170.

Post con algunas fichas técnicas de optoacopladores para uso general en encapsulado DIP.

Tiempo atrás había publicado aquí un semáforo muy simple, hecho con solo 3 transistores. Ese circuito puede ser usado también como indicador de dirección o simplemente como intermitente. Veamos estos nuevos casos.

En este post propongo algunos circuitos para controlar un motor DC en ambos sentidos de marcha usando solamente un relé doble inversor y pulsadores o interruptores desviadores.

En este artículo veremos como obtener distintas tensiones (9V, 12V o más) de un Power Bank o de un cargador de baterías gracias al módulo ZY12PDN.

Proyecto de un sistema automático de refrigeración con un ventilador y solo 3 transistores, que usa un termistor NTC.

Los MOSFETs de potencia son componentes muy útiles y fáciles de usar. Permiten de controlar cargas con corrientes continuas elevadas como por ejemplo motores, luces y tiras de leds. Aquí veremos algunos modelos.

En este post veremos brevemente algunos convertidores DC DC di tipo step-up y step-down, muy compactos y económicos.

He decidido de actualizar el aspecto visivo de Inventable. Esta nueva gráfica tiene un layout de tipo masonry que es inmediato y fácil de explorar.
El proyecto de la figura es un timer muy simple, hecho con solo dos transistores de uso común y un relé de salida.

¡Felices fiestas de fin de año! Desde Inventable quiero agradecer a todos los amigos lectores que constituyen esta comunidad de curiosos, inventores y apasionados de electrónica.
Últimos comentarios
Alejandro Ballesteros Morales
"cara de huevo "
jose luis
"Hola. Necesito saber si este proyecto funciona igual con el TL074 Gracias "
gustavo quiroga
"excelente los proyectos y muy bueno los articulos didacticos, felicitaciones "
Diego
"Gracias por pasarte cada tanto por aquí. Yo seguiré entrando siempre. Saludos "
Diego
"Muchas gracias por el proyecto. Saludos "
Luz de cortesía con salida de potencia – Inventable
"[…] Hola gente. Les propongo una nueva versión de potencia de la luz ..."