




Vista pictórica de un puente para motores de corriente continua (DC) conectado a dos motores.
En esta artículo veremos en modo detallado como funciona un puente de tipo "H", usado para controlar motores de corriente continua y de baja tensión. Usaremos como ejemplo de referencia el circuito integrado L298, muy conocido en el ambiente de la robótica de pasatiempo.
Puente H con interruptores

Sentido horario o anti-horario de un motor DC según la polaridad de la alimentación.
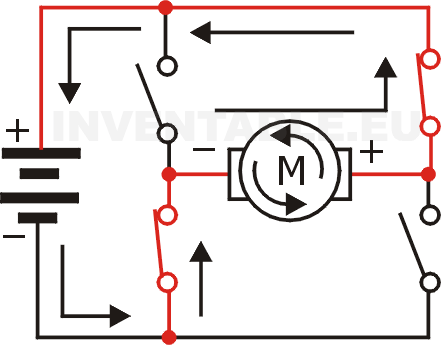
En los motores de corriente continua, la dirección de giro de los mismos depende de la polaridad de la alimentación. Para poder cambiar dicha polaridad, sin necesidad de invertir la batería, se pueden usar 4 interruptores conectados como indicado en la figura.

Puente "H" hecho con interruptores.
Este tipo de conexión se conoce como "Puente H" (por la forma del circuito que se asemeja a la letra "H") y posee propiedades muy interesantes que veremos a lo largo de este artículo.
Si activamos el interruptor alto de la izquierda y el interruptor bajo de la derecha, el motor quedará alimentado con el positivo a la izquierda y el negativo a la derecha, por lo tanto girará en un modo (la circulación de la corriente se encuentra indicada con las líneas de color rojo y las flechas).

Motor con giro horario en un puente "H" hecho con interruptores.
Si por el contrario, activamos el interruptor alto de la derecha y el bajo de la izquierda, el motor quedará alimentado con el positivo a la derecha y el negativo a la izquierda, por lo tanto girará al contrario.
Motor con giro anti-horario en un puente "H" hecho con interruptores.
Este sistema tiene un inconveniente: si se accionan contemporáneamente los dos interruptores de la izquierda o los dos interruptores de la derecha se producirá un cortocircuito de la alimentación como podemos observar en la figura, por lo tanto es necesario evitar esta situación como veremos más adelante.

Cortocircuito de la alimentación en un puente "H" hecho con interruptores.
Una condición interesante de este sistema es cuando accionamos solamente los dos interruptores de arriba, en ese caso el motor no se encuentra alimentado por la batería y además sus terminales de entrada estarán unidos entre si, a través de los interruptores. Este tipo de conexión mantiene el motor "frenado" y puede llegar a ser de utilidad en muchos casos. Lo mismo ocurre si en lugar de los dos interruptores altos, activamos ambos interruptores bajos.

Motor frenado en un puente "H" hecho con interruptores.
Naturalmente, un puente hecho solo con interruptores no es muy versátil, he dado este ejemplo para comprender en modo simple y claro el principio de funcionamiento del puente "H". Pero si reemplazamos los interruptores mecánicos por interruptores electrónicos, la cuestión se pone interesante porque estos interruptores electrónicos pueden ser activados por circuitos lógicos como por ejemplo las salidas de un microcontrolador.
Puente H con transistores
Para hacer un puente "H" electrónico se pueden usar transistores NPN, PNP o combinaciones de ambos (configuración complementaria). También se pueden usar MOSFET de potencia. Nosotros estudiaremos la versión con transistores NPN porque es la solución adoptada por el integrado L298 que veremos más adelante.

Uso de un transistor NPN como interruptor.
Un transistor NPN es un componente electrónico cuyo funcionamiento puede ser complejo de describir pero aplicado a nuestro puente es fácil de analizar porque el mismo trabaja con solo dos estados posibles (corte o saturación). Podemos imaginarlo simplemente como un interruptor "electrónico" que está abierto cuando la base (b) se encuentra a 0V y se cierra cuando la base es positiva.

Puente H con transistores NPN sin la lógica de control.
Muy bien, ahora reemplazamos los interruptores del puente "H" con transistores. De este modo, la parte de salida del puente está completa, ahora podemos ocuparnos de la parte que controla estos transistores. Para ello usaremos puertas lógicas de tipo "AND"
La lógica de control
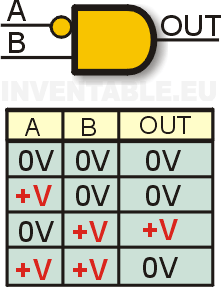
Una puerta "AND" está compuesta por componentes electrónicos integrados y, sin saber como está hecha internamente, podemos verla como una especie de "caja negra" que tiene dos entradas y una salida.
La tabla de verdad (no es un chiste, se llama realmente así esta tabla) nos muestra las 4 combinaciones posibles de sus entradas y la salidas respectivas. Podemos ver que solo cuando las dos entradas son positivas, la salida pasa a positivo, en todos los otros casos será negativa (0V).

Puerta lógica "AND" con su respectiva tabla de verdad.
Además de esta puerta "AND", para nuestro puente necesitamos otro tipo de puerta "AND" en la cual podemos observar un pequeño círculo en una de sus entradas. Es siempre una puerta "AND" pero con una de sus entradas invertidas. En este caso la tabla de verdad es diferente.
Puerta lógica "AND" con entrada invertida y respectiva tabla de verdad.
Si combinamos los dos tipos de puertas "AND" que hemos visto antes, con dos interruptores electrónicos come se observa en la figura siguiente, la salida "X" puede encontrarse en 3 condiciones posibles: abierta, a positivo o a negativo. Esto dependerá del estado lógico de las dos entradas. Este tipo de salida se conoce como "triestado" (tri-state en inglés) y es muy usada en la electrónica digital.

Conexión de dos puertas "AND", una de ellas con una entrada invertida, a una rama de puente H y tabla de verdad.
Ahora veamos como trabaja nuestro ejemplo. Cuando la entrada "ENA" (habilitación) se encuentra a 0V, sin importar el estado de la entrada "A", la salida "X" estará abierta porque las salidas de las dos puertas "AND" estarán a 0V y por lo tanto los dos interruptores estarán también abiertos.
Cuando aplicamos tensión a la entrada de habilitación (ENA), uno de los dos interruptores se activará en base a la tensión de la entrada "A": el de arriba con "A" a positivo o el de abajo con "A" a 0V. Por lo tanto , la salida "X" estará conectada a masa (GND) o a positivo (+V). Como vemos, hemos construido una de las ramas del puente "H" agregando las dos entradas que nos permiten de controlarlo.
Funcionamiento del puente completo
Ahora nos basta un circuito idéntico para la segunda rama del puente "H" como podemos ver en la figura. Ya tenemos nuestro puente completo y lo podemos conectar a un motor. Observen que la entrada de habilitación (ENA) está conectada a las dos ramas del puente mientras que las otras dos entradas (In1 e In2) son independientes. Para mayor claridad no se han representado las resistencias necesarias en las bases de los transistores.

Puente "H" completo con lógica de control. Para mayor claridad no se han representado las resistencias en las base de los transistores.
Con ENA a 0V, todas las salidas de las puertas AND están también a 0V y por lo tanto, los transistores están abiertos y el motor se encuentra no alimentado (condición de reposo).
Si ponemos ENA a positivo y las entradas IN1 e IN2 a 0V, se activarán las puertas "B" y "D" con sus transistores respectivos (que tienen la entrada invertida). En esta condición, las dos entradas del motor estarán a masa y este no se moverá tampoco porque falta el positivo.

Puente "H" con solo la entrada de control ENA a positivo (motor frenado).
Si ponemos la entrada IN1 a positivo mientras mantenemos la entrada IN2 a 0V, la puerta "A" se activará junto con la "D", mientras que la "B" junto con la "C" estarán desactivadas y el motor recibirá tensión positiva desde el transistor conectado a la puerta "A" y negativo desde el transistor conectado a la puerta "D". El motor girará en un sentido.

Puente "H" con las entradas de control IN1 y ENA a positivo (giro del motor horario).
Si en lugar de la entrada IN1, ponemos a positivo la entrada IN2 mientras mantenemos la entrada IN1 a 0V, la puerta "C" se activará junto con la "B", mientras que la "A" junto con la "D" estarán desactivadas y el motor recibirá tensión positiva desde el transistor conectado a la puerta "C" y negativo desde el transistor conectado a la puerta "B". El motor girará en sentido contrario.

Puente "H" con las entradas de control IN2 y ENA a positivo (giro del motor anti-horario).
En el caso de poner las entradas IN1 e IN2 a positivo, las puertas activas con los transistores respectivos serán "A" e "C", ambos contactos del motor estarán a positivo pero faltando la masa, este no se moverá, como en el caso que vimos con IN1 e IN2 a 0V.

Puente "H" con todas las entradas de control a positivo (motor frenado).
Surge una pregunta espontanea, ¿para que sirve la entrada ENA si podemos controlar el motor completamente solo con IN1 e IN2?
Como mencionado al principio de este artículo existe una sutil diferencia cuando IN1 e IN2 están a 0V mientras ENA está a 0V o a positivo: cuando ENA está a 0V ninguno de los transistores conduce y los contactos del motor están libres mientras que cuando ENA es positivo mientras IN1 e IN2 están a 0V, los transistores inferiores conducen y el motor está "frenado".
En muchos casos esta diferencia no es significativa y es más cómodo reducir la cantidad de líneas necesarias de nuestro sistema de control (siempre faltan salidas de los micros 🙂 ). En otros casos, como por ejemplo si usamos nuestro puente para controlar motores paso a paso, la desconección completa del motor es importante en ciertos momentos del ciclo y por lo tanto nos servirá también la entrada ENA.
El L298
Ahora veamos un circuito integrado concreto. En la figura encontramos el diagrama completo del L298, un integrado que tiene dos puentes "H" idénticos y que nos permite de controlar dos motores de corriente continua (DC).

Diagrama interno del circuito integrado L298.
Podemos observar que la parte negativa de los puentes no se encuentra conectada directamente a masa sino que está disponible en el pin 1 para el puente de la izquierda y en el pin 15 para el puente de la derecha. Agregando resistencias de valor muy bajo entre estos pines y masa (RSA y RSB en la figura) podemos medir la corriente que consume cada puente a través de un sistema electrónico que mida la tensión en los puntos "SENS A" y "SENS B" de la figura. Esto puede ser útil para regular la corriente del motor (con técnicas de tipo PWM sobre las entradas de control) o simplemente activar un sistema de protección si el motor está atascado y por lo tanto su consumo es excesivo. Las resistencias RSA y RSB se conocen como resistencias de Shunt y he hablado de ellas en mi artículo "Sensor de corriente".
Diodos de protección para cargas inductivas
Un motor está compuesto por arrollamientos de alambre (bobinas) y estas presentan los mismos problemas de los relés que hemos analizado en mi artículo "como controlar un relé con un transistor", es decir, sobre los terminales de entrada del motor aparecen elevadas tensiones inducidas que pueden dañar los transistores del puente.

Diodos de protección para los transistores de salida en un puente "H".
Para resolver el problema se pueden usar diodos de conmutación veloces de tipo Shottky o, si nuestros motores no son particularmente potentes, simplemente diodos rectificadores comunes como el 1N4007. Lamentablemente, el hecho que las salidas del puente son flotantes y pueden cambiar de polaridad, es necesario usar 4 diodos en vez de uno. La conexión necesaria para un puente podemos verla en la figura.
Los diodos de protección trabajan de esta manera: en condiciones normales de operación, todos los diodos se encuentran polarizados al contrario, por lo tanto no conduce ninguno de ellos y no afectan el funcionamiento del circuito. Cuando aparece un impulso de elevada tensión en uno de los terminales del motor, este puede llegar a ser más positivo que la tensión de alimentación o más negativo que masa. Si es más positivo que la alimentación, el diodo de arriba conduce, "descargando" este impulso hacia positivo y evitando que el transistor se rompa por exceso de tensión con polaridad contraria. Lo mismo sucede si el impulso es más negativo que masa, en este caso será el diodo de abajo que descargará el impulso hacia negativo.
En un próximo artículo publicaré el proyecto completo de un puente con L298 pensado para motores DC.
Hasta la próxima.
- Indice de todos los artículos de Inventable-
Los contenidos de este blog son originales y están bajo una licencia Creative Commons BY_NC_SA
![]()
Vega
Hola Gabriel: ¡Perfecto! Pero preparate para las preguntas 🙂 .
Como detalle simpático, creo que en un par de ocasiones mezclaste el italiano con el español, jeje (bueno, para mí es simpático, no como ezos ke eskriven deformando el hidioma a propocito).
Un abrazo,
Juan
inventable
Gracias Juan. Después de 25 años de italiano la contaminación se me escapa aunque si trato de evitarlo.
Soy curioso, ¿en que frases?
Gabriel
Vega
En este caso, sólo me di cuenta de «orario» y «anti-orario» (en las figuras). A veces se te escapa «il» en lugar de «el» o «la» 🙂 .
Te repito que NO ES en absoluto una crítica, para nada. Todo lo contrario: me hace la lectura más amena, jeje.
Un abrazo,
Juan
Jacinto Guardado Izquierdo
Articulo que da gusto leer y ver, así se entiende todo perfectamente. Gracias por tu tiempo y conocimientos.
cesar
excelente muy explicito espero la segunda parte con ansiass
inventable
Juan, horario en castellano sin «h» es un horror ortográfico. Menos mal que me avisaste!!
Sufro de cocoliche al contrario 🙂
Gabriel
Vega
Bueno, sí, pero en italiano está bien.
JOSE
Hola Gabriel. Ante todo enhorabuena por el trabajo que haces. Soy novato en esto de la electronica y estoy iniciándome con arduino las protoboards. A ver si me puedes ayudar con un problema que no puedo resolver. El caso es que estoy haciendo un circuito para mover un motor de cc con la ayuda de un transistor cunado se alcance cierta temperatura (que mido a través de un sensor). Para ello utilizo un fuente de alimentación externa de 9V. El caso es que creo que lo tengo todo bien montado, tengo la resistencia entre la base y el pin de la placa, tengo también el diodo de protección, etc. El caso es que cuando conecto el circuito el motor se mueve antes incluso de alcanzar la temperatura indicada en el programa. Cuando se alcanza dicha temperatura gira mucho más rápido, pero lo que yo quiero es que esté completamente parado antes de alcanzar la temperatura. Es como si el transistor no llegase nunca a estar abierto del todo y dejase pasar algo de corriente. ¿Por qué ocurre esto? ¿Dónde puede estar el fallo? Muchas gracias.
inventable
Hola Jose, gracias por el elogio. Los transistores son fundamentalmente amplificadores y no interruptores perfectos. Para obtener un pasaje neto entre corte y saturación es necesario que la ganancia del transistor sea muy grande y por otro lado que el umbral de conducción esté bien definido. Una solución es usar dos transistores en configuración Darlington y quizás agregar un zener a la base. De cualquier manera, fijate en este proyecto que he publicado aquí y que hace más o menos lo que estas buscando.
JOSE
Madre mía, eso de momento es demasiado complicado para mí, dame tiempo que aprenda, jeje.
De todas formas muchas gracias por tu respuesta y un saludo.
German
Hola Gabriel, te felicito por la pagina esta muy buena, pero me salta una duda en el tercer grafico de la logica de control [«Conexión de dos puertas «AND» (una de ellas con una entrada invertida) a una rama de puente «H» y tabla de verdad respectiva.»]
A mi entender esta invertida la salida X (según tu tabla). desde mi punto de vista al estar las dos entradas con voltaje, X vale V+ y al estar solo ENA con voltaje, X vale GND.
Puede que mi logica este errada y no haya comprendido bien los terminos.
Un Saludo grande des Arg.
inventable
Hola German, tu observación es correcta. Ya he corregido el error en la figura. Te agradezco mucho por tu colaboración 🙂
Gabriel
Guillermo Goñi
Hola Gabriel
Lo primero, y dado que es la primera vez que me decido poner un comentario, quiero darte las gracias por Inventable. Soy un aficionado al miniaturismo en general y más concretamente al Modelismo Naval y Belenismo (donde encontré Inventable). Para mí la electrónica no es un hobby sino más bien un medio. Aunque muchas veces no merece la pena el caso es que me gusta hacer las cosas por mí mismo, al menos hasta donde puedo llegar. Gracias a Inventable puedo mejorar mis proyectos y además sabiendo lo que hago: es decir aprendiendo. Te comento todo esto porque espero que te llene de satisfacción y recompense, al menos un poco, el trabajo y el gran esfuerzo que supone mantener un sitio como este. Y también lo hago extensible a tus colaboradores y a todo el que te anima a seguir adelante.
Tanto oír hablar del L298 cuando se trata de controlar motores de CC con Arduino y por fin he entendido que es lo que hace “esa cucaracha negra”. El caso que llevo desde algún tiempo hacer un puente H para que soporte unos 10 Amp (el 298 no me vale) para las hélices de una maqueta de un barco. Con lo poco que entiendo y lo que he podido investigar necesito usar MOSFET´s para esto y por lo que parce empieza a tener sus complicaciones. Ya sé que me salgo un poco del hilo pero desde vuestros conocimientos (que superan con creces a los míos) ¿Me podríais recomendar algo?
inventable
Hola Guillermo, te agradezco por tus elogios, me gusta saber que este esfuerzo sirve a tanta gente, y además sin fronteras! Muy interesante cuando dices que la electrónica no es un hobby sino más bien un medio. A mi me sucede exactamente lo mismo, un argumento interesante.
Respecto al puente, si, es necesario usar MOSFETs, bastante potentes y una lógica de control similar a la del artículo. Algunas preguntas:
El control del motor debe ser en puente? (con posibilidad de adelante-atrás)
Que electrónica controlaría el puente?
En que zona vives?
De que tensión es el motor?
Necesitas también control de la velocidad (con PWM por ejemplo)?
Hasta luego.
Gabriel
Héctor Javier
Muy bien explicado, como para refrescar conocimientos oxidados por el paso del tiempo.
Gracias Gabriel.
Saludos
HJ
Guillermo Goñi
Hola de nuevo, Gabriel
Respondiendo a tus preguntas te comento:
Si, necesito invertir el giro y controlar la velocidad (PWM). Con dos hélices se pueden hacer que giren a diferente velocidad en función de la posición del timón para que la maqueta vire mejor (incluso se puede dar el caso que una hélice gire al sentido contrario de la otra).
Tensión motor: 6-12v. Las baterías Lipo con 7,2 es una buena opción sobre todo si se quiere alimentar también el receptor de radio-control, los servos y la propia placa Arduino con la misma batería a través de reguladores. Con 12 voltios suele dar problemas ya que el salto de tensión (5-12) es elevado y supone disipar calor, se agota antes la batería y al final quemas algo…
Controlar el puente con Arduino (mis conocimientos sobre micro-controladores se reducen a esto)
¿Cuál es el fin?, ¿Cúal es el medio? Ser o no ser… Inventable es un sitio donde encuentro propuestas y soluciones por medio de la electrónica. Sus artículos, además de estar bien trabajados y respaldados con la práctica, rebosan didáctica en sus párrafos con lo cual también enseña electrónica. Se encuentra en un portal amigable y bien cuidado. Todo ello supone un gran trabajo y esfuerzo. ¿Acaso todo esto no supone tener pasión por la electrónica? Yo estoy convencido que sí.
Por cierto, se me olvidaba, vivo en Cantabria (España).
inventable
Hola Guillermo, aprecio mucho tus opiniones respecto a mi trabajo. Por mi modo de ser pongo pasión por todas las cosas que hago, sean de electrónica como también en otros sectores. Y a eso le sumo también la cuestión estética que es muy importante para mi. Mi estética se relaciona con la belleza de la simplicidad, de la sinceridad y de las cosas bien hechas.
Volviendo al tema del puente, yo nunca he controlado motores tan potentes y no tengo proyectos que te puedan ser útiles. He buscado en Internet, encontré este proyecto https://mycontraption.com/high-power-mosfet-motor-driver/. Electrónicamente hablando podría funcionar pero no me convence el impreso por la posición de los mosfet que no permite de instalar disipadores de grandes dimensiones. Sobre cosas ya hechas he visto este driver en Amazon que parece bastante potente y cuesta relativamente poco. Los mosfet están bien alineados para poder instalar buenos disipadores.
Hasta pronto.
Gabriel
Juan manuel
Exelentes todas las explicaciones informacion muy valiosa
Juan
Excelente aporte chicos.
Juan
Fabian Saldarriaga
Excelente, gracias.
Alfredo
Buenas… me parece muy interesante … me gustaría ser participe… como puedo hacer?? Gracias…
rafael
HACER UN DIAGRAMA PARA MOVER UN MOTOR CON LAS SIGUIENTES CARACTERISTICA 90V 8AMPERIOS, ENTRADA DE RED PUBLICA 115- ENVIAR REPUESTA AL CORREO ELECTRONICO manotasrafael@hotmail.com GRACIAS POR LA ATENCION PRETADA.
HJ
Hola Rafael, por si no lo sabes, así no funciona este tipo de blogs…
Si necesitas un desarrollo a medida entonces contrata un ingeniero que lo desarrolle.
Saludos
HJ
SP
Excelentes todas las explicaciones. Gracias