


Etiqueta: microcontroladores

Con un disco telefónico que tenía en mi laboratorio se me ocurrió la idea de construir un timer de cocina estilo vintage.
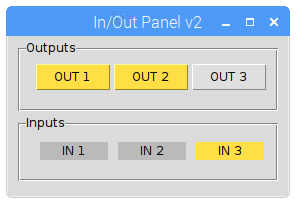
En esta segunda parte del proyecto desarrollaremos una nueva versión del programa que hemos visto en la primera parte. El aspecto gráfico de la interfaz es parecido a…
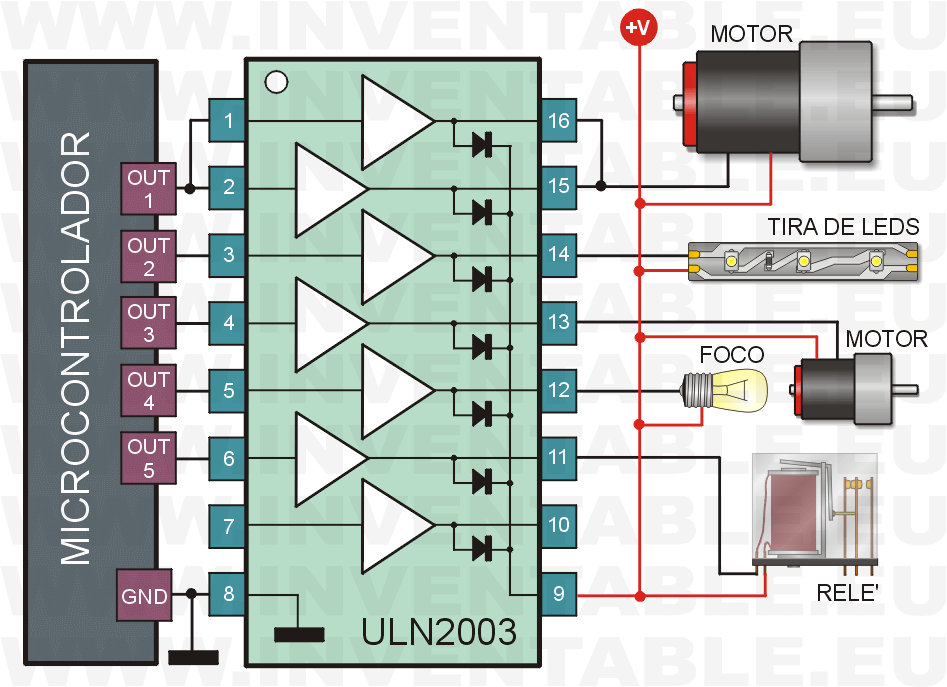
El ULN2003 es un circuito integrado muy versátil, compuesto internamente por 7 drivers idénticos e independientes entre si, que permiten de comandar con un microcontrolador relés, pequeños motores DC, motores paso a paso, luces de baja tensión o tiras de leds.

Proyecto completo para el control de entradas y salidas con relés de una Raspberry PI a través de un programa con interfaz gráfica escrito en Python.

Con el desarrollo y la difusión de la lógica a 3,3V en lugar de los clásicos 5V a veces nos encontramos con el problema de conectar dispositivos entre…

Proyecto completo para la construcción de un temporizador (timer) pensado especialmente para meditar.

Proyecto completo para la realización de un sistema de iluminación para pesebre navideño (Belén) que, a través de dos circuitos sencillos, controla las luces del día, de la noche y la iluminación de las casas simulando la luz del fuego o de las velas.

En este post describo la realización de un probador universal para cables de audio mono o estereo con conectores jack, minijack, xlr o rca.

Proyecto para la realización de un controlador para tiras RGB de LEDs de alta potencia con Mosfets. Usa un microcontrolador PIC12F629.

Proyecto DIY para la construcción de un programador de microcontroladores Pics que se inspira al modelo PicKit2 Clone con puerto USB.

Proyecto para la realización de una interfaz experimental muy sencilla con entradas, salidas y puertos seriales para Raspberry PI.

Proyecto DIY para la construcción de un repetidor de timbre inalámbrico (wireless) con micocontroladores. Guía completa con diseños y fotografías.

Descripción sintética del nuevo ordenador monotarjeta de bajo costo Raspberry PI, base de futuros proyectos.

Proyecto DIY de una llave electrónica universal económica hecha con microcontrolador que puede ser usada en una infinidad de aplicaciones.

En este artículo hablaré de como construir un Controlador para LEDs RGB (rojo, verde, azul) automático. El circuito es muy simple y usa un microcontrolador PIC12F629 de la microchip. Debido…

Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. Se describirán problemas y soluciones de un sistema concreto de movimiento, analizando los distintos aspectos técnicos.

Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. Se describirán problemas y soluciones de un sistema concreto de movimiento, analizando los distintos aspectos relativos.

En este artículo veremos como conectar dispositivos a las entradas de un microcontrolador usando las técnicas llamadas NPN y PNP. También se explicará el uso de fotoacopladores para aislar electricamente las entradas y las ventajas que esto acarrea.
Últimos comentarios
Eduardo Hernández
"Tengo curiosidad de saber si este circuito presta para controlar la temperatura en ..."
Nasser
"Thanks ❤️ "
Nasser
"Thanks "
Manuel
"Saludos desde Cuba. Hola a todos. Se percibe en este sitio respeto, amor y un ..."
Samuel González castillo
"Entendí el funcionamiento de el simulador de luz tipo escalera "
Samuel González castillo
"Entendí el funcionamiento de el simulador de luz tipo escalera "