



En esta cuarta y última parte describo a través de fotografías y diseños el cableado del robot Calimaro.
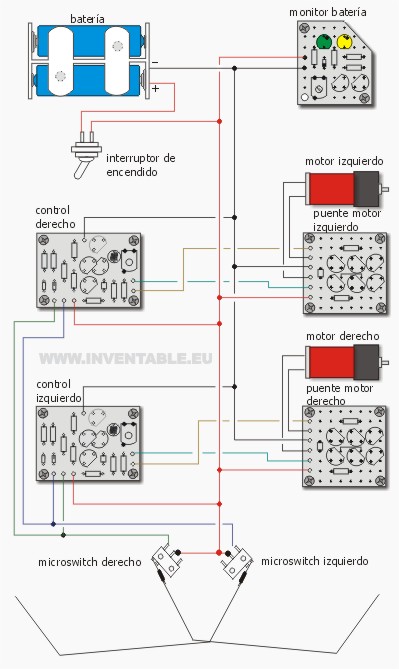
18. Esquema general de conexión
19. Cableado del negativo

20. Cableado del positivo

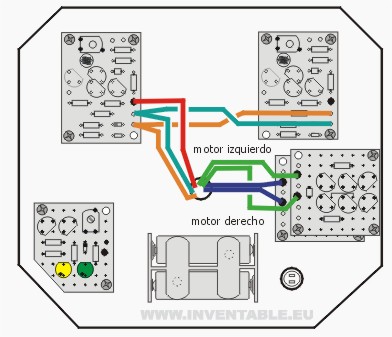
21. Cableado de los motores y de los microswitchs
22. Cableado entre control y puentes

Fin de la cuarta parte
Links a las otras partes
- Indice de todos los artículos de Inventable -
Los contenidos de este blog son originales y están bajo una licencia Creative Commons BY_NC_SA
![]()
EvilGod666
La verdad que muy bueno el proyecto, estoy a un paso de usarlo como trabajo práctico para una materia de la facu. Pero mas q nada excelente laburo, se agradece mucho la dedicación y la generosidad de brindar estos aportes.
Abrazo grande loko
inventable.eu
Muchas gracias Evil. Tu comentario, junto con el de otras personas me ayudan a continuar.
Buen trabajo.
Rafa
Muy buen proyecto y aporte.. se agradece mucho lo que haces!
Saludos..
Gracias Rafa!!
tinerfe
Muy buen trabajo, tuve uno pero digital lo ando buscando y no lo encuentro, se me habra ido buscando la luz, es una broma, de verdad que esta muy bien currado, tanto a nivel de simplicidad como de componentes, muchas veces claro los pic ahorran un monton de componentes y circuiterias, pero claro cuantos sabemos meternos con los pic,nunca los he entendido, se que son digital, pero ahi me pierdo a nivel de meterme con el ordenador y aplicarles los pasos que requiere, en fin debe de ser que soy de la antigua generacion analogica, saludos y gracias por estos aportes.
Johan
Hola ! Que buen trabajo el tuyo, ahora mismo estoy montando este proyecto pero me encuentro con un problema, el sistema funciona como se espera, avanza con luz y gira con golpe, pero esto lo hace con muy poca fuerza! es decir no es capas de acelerar y mover su propio peso no se porque, las baterias no son porq al conectar un motor directo a ellas gira con gran fuerza! no se que pueda ser, espero puedas darme una ayudita con eso. Gracias!!
¿Podés probar a aumentar la tensión de alimentación (por ejemplo a 9V)? Me gustaría mucho ver una foto de tu robot 🙂
Shamir
Disculpa tengo una pregunta… se que es un tema un poco antiguo pero me agrado mucho tu proyecto y lo intente hacer y tengo exactamente el mismo problema que johan (falta de potencia) si aumento el voltaje a 9V no habria riesgos de que se queme algun componente?
Gustavo
Hola, quiero agradecerte por tu trabajo, me ayudo mucho. El circuito lo construí sobre una protoboard modificando un par de cosas para simplificarlo un poco. Y para el mecanismo utilice piezas LEGO, así pude agregar un juego de engranajes a los motores para darle más fuerza.
Ahora me gustaría utilizar sensores infrarrojos para detectar obstáculos y quizá diseñar un mecanismo más complejo con Lego, algo como patas en vez de ruedas.
¿cómo te puedo enviar una foto?
Hola Gustavo. Estoy tratando de crear un servicio en el blog para que la gente pueda subir las fotos. Espero en los próximos días de poder activarlo. Por ahora puedes mandarlas a gabriel@mediacomm.it.
Respecto al tema de los sensores infra-rojos, veamos que se puede hacer. Seguí este task. 🙂
Enrique
Amigo tengo dos preguntas, que tipo de motor se utiliza? y las pilas como deben de estar conectadas?
Hola Enrique, el motor es de corriente continua y baja tensión con una caja de reducción a engranajes (como los que se usan en los juguetes). La pregunta respecto a las pilas no la entiendo 😯
Enrique
Man necesito tu ayuda, otra pregunta, tengo problema con las conecciones A Y B !! y tengo un problema que el robot mueve el motor antes de apuntar con la luz, si tienes la respuesta exacta si puedes decirmela !
Enrique no tengo la respuesta exacta 😕 ¿Puedo decírtela lo mismo? 🙂
Puedes probar la placa del motor sin conectarla a la parte de la fotocélula. Si conectas A a positivo y B a negativo el motor gira en un modo, si A a negativo y B a positivo gira al contrario, si conectas A y B a negativo el motor no debe girar. Si sucede lo que te digo, la placa del motor funciona bien (no tienes que conectar A y B a positivo porque la placa se pone en corto!!). Reconecta las placas de los motores a las placas de la fotocélulas y sin estar en una zona con mucha luz mové los trimmer PR1 en un sentido y en el otro hasta que los motores se detienen. Si sucede así, todo funciona bien. Recuerda que la fotocélula izquierda comanda el motor derecho y viceversa. Quisiera ver una foto de tu robot. ¿Puedes subirla?
Buen trabajo 🙂
edgar aguila
hola, ante todo dejame felicitarte por este excelente blog, es muy interesante y muy bien explicado pero tengo una pregunta: no tendras «calimaro» pero que sigas lineas?
No edgar pero estaría bueno hacerlo. Ando con ganas de seguir desarrollando el tema de los robots. Calimaro lo hice 10 años atrás y me gustaría retomar el argumento. Por ahora no tengo nada 🙁
christhian fabian
hola, te felicito por el aporte que nos das el proyecto es muy bueno.Una consulta tengo varios motores paso a paso quiero utilizarlas haciendo funcionar con base a transistores y lógica CMOS que gire en ambos sentidos horario y anti horario tendrías un esquema para esto. Gracias
Hola Christhian, los motores paso a paso son más complejos de controlar respecto a los de continua y un circuito hecho solo con transistores y lógica cmos es una cosa difícil de hacer si ayuda de microcontroladores o chip especializados. Yo no tengo ningún proyecto 🙁
Ezequiel
Saludos desde argentina… Muy buen proyecto…
santiago
muy buen aporte…sigue asi …exitos
Jose Alberto Centeno Gonzalez
Tengo dias indagando sobre proyectos para motivar a niños y jovenes interesados por hacer o inventar cosas, creo que es de las mejores materias que he encotrados en la internet hasta ahora. Te mando un saludos y agradeciminetos por el tiempo que le dedigaste a este blog.
inventable
Muchas gracias Jose Alberto por tu comentario 🙂