



Etiqueta: motoresPágina 1 de 2

En este post propongo algunos circuitos para controlar un motor DC en ambos sentidos de marcha usando solamente un relé doble inversor y pulsadores o interruptores desviadores.

Driver compacto para dos motores DC, pensado para ser usado en un pequeño robot. Usa el circuito integrado L293D que está compuesto por dos puentes «H», bastante similar al L298 pero con el encapsulado de un integrado común (dual dip line) y menos potente del 298 (600mA max. por canal).

El circuito permite de accionar un pequeño motor DC en los dos sentidos de marcha según la posición de un potenciómetro. Usa dos integrados 555.

Cuando trabajamos en corriente continua (DC) con bajas tensiones, podemos usar diodos comunes como protección para controlar relés, solenoides y motores.

El siguiente proyecto es un circuito para controlar un servomotor de radiocontrol (RC) con un circuito integrado 555.

Después de 20 años he construido una segunda versión de este querido motor, que inauguró el blog Inventable. Aquí pueden verlo, con un video.
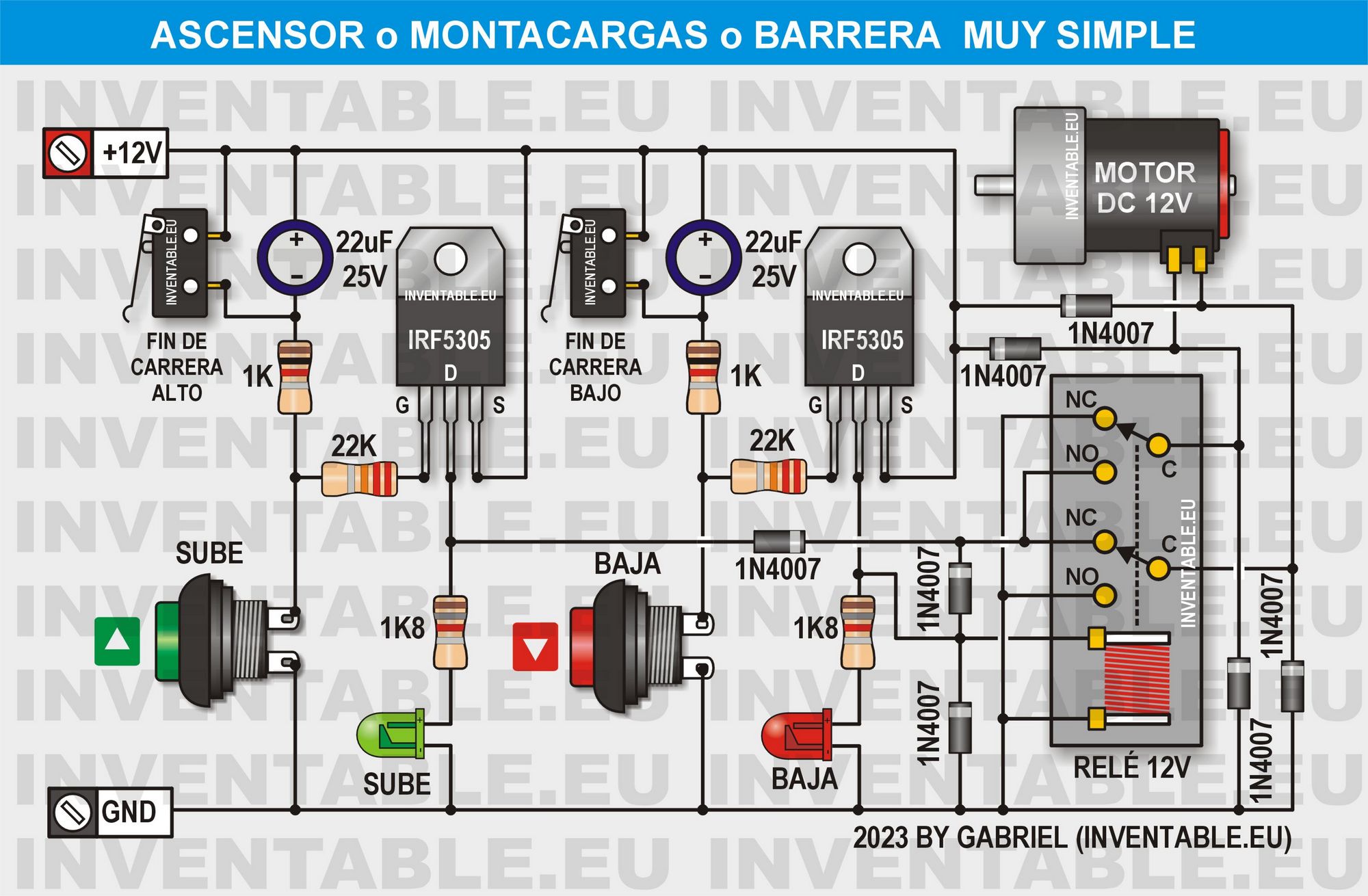
Circuito demostrativo didáctico muy simple que permite de controlar un ascensor o montacargas y también también un portón o una barrera.

Celebrando el aniversario del robot SAM me dieron ganas de construir uno nuevo. Sería una óptima plataforma para experimentar nuevas tecnologías que podrían ser publicadas en Inventable durante…
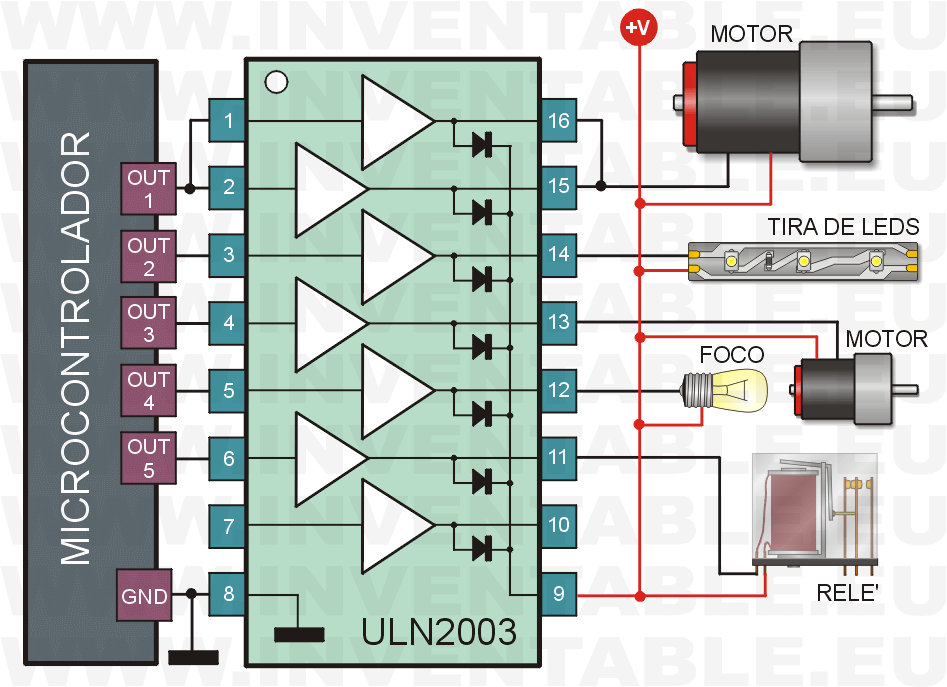
El ULN2003 es un circuito integrado muy versátil, compuesto internamente por 7 drivers idénticos e independientes entre si, que permiten de comandar con un microcontrolador relés, pequeños motores DC, motores paso a paso, luces de baja tensión o tiras de leds.
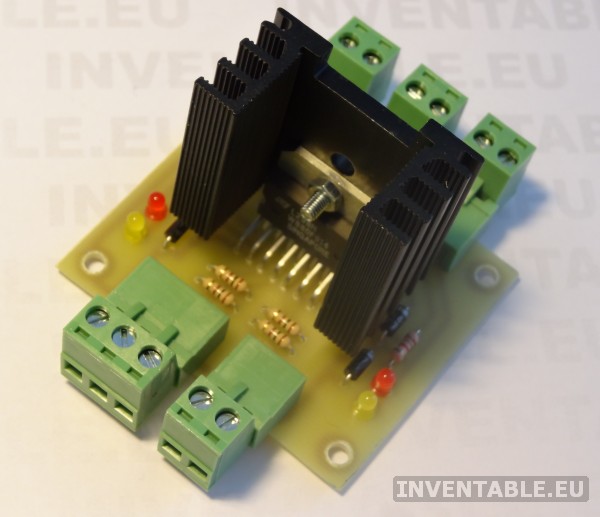
Proyecto Open Source para la construcción de un driver para motores DC que usa el integrado L298. Ideal para robots.

En este post veremos detalladamente como funciona un puente «H», usado para controlar motores de corriente continua y de baja tensión.

Pequeño amplificador con el LM386, regulador de tensión con el LM317, control de un motor DC con un relé, driver para tiras de leds, etc.

Proyecto DIY para la construcción de una pequeña unidad de potencia para motor paso a paso (step motor) con entradas fotoacopladas.

Proyecto DIY para la construcción de una pequeña unidad de potencia para motor paso a paso (step motor) con un solo circuito integrado.

Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. Se describirán problemas y soluciones de un sistema concreto de movimiento, analizando los distintos aspectos técnicos.

Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. Se describirán problemas y soluciones de un sistema concreto de movimiento, analizando los distintos aspectos relativos.

Proyecto completo para la construcción de Calimaro, un robot didáctico hecho solo con transistores y materiales fáciles de conseguir. PARTE 4

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir. PARTE 3

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir. PARTE 2

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir.
Últimos comentarios
Manuel
"Saludos desde Cuba. Hola a todos. Se percibe en este sitio respeto, amor y un ..."
Samuel González castillo
"Entendí el funcionamiento de el simulador de luz tipo escalera "
Samuel González castillo
"Entendí el funcionamiento de el simulador de luz tipo escalera "
jefferson
"La luz de 110 V es forma eficiente para los focos aoradores, ..."
billy vasquez
"hola kevin, estoy totalmnte de acuerdo contigo, el simulador es una herramienta excelente, ..."
Cèsar Garibaldi Gàlvez
"Este circuito de conmutacion es muy importante tanto para escaleras como para puntos ..."