



Etiqueta: transistores
El proyecto de la figura es un timer muy simple, hecho con solo dos transistores de uso común y un relé de salida.
El circuito que les propongo es el de una célula fotoeléctrica muy simple, hecha con un LDR (resistencia sensible a la luz), dos transistores y un relé.
Proyecto de un semáforo muy simple hecho con solo 3 transistores comunes.

El 2N2907 es un viejo y conocido transistor bipolar PNP de uso general construido inicialmente por la Motorola en los años ’60 y todavía muy usado por su…

El BC558 es un transistor bipolar PNP de alta calidad para aplicaciones generales, desarrollado por la Philips y la Mullard. Este transistor es parte de una familia de transistores con…
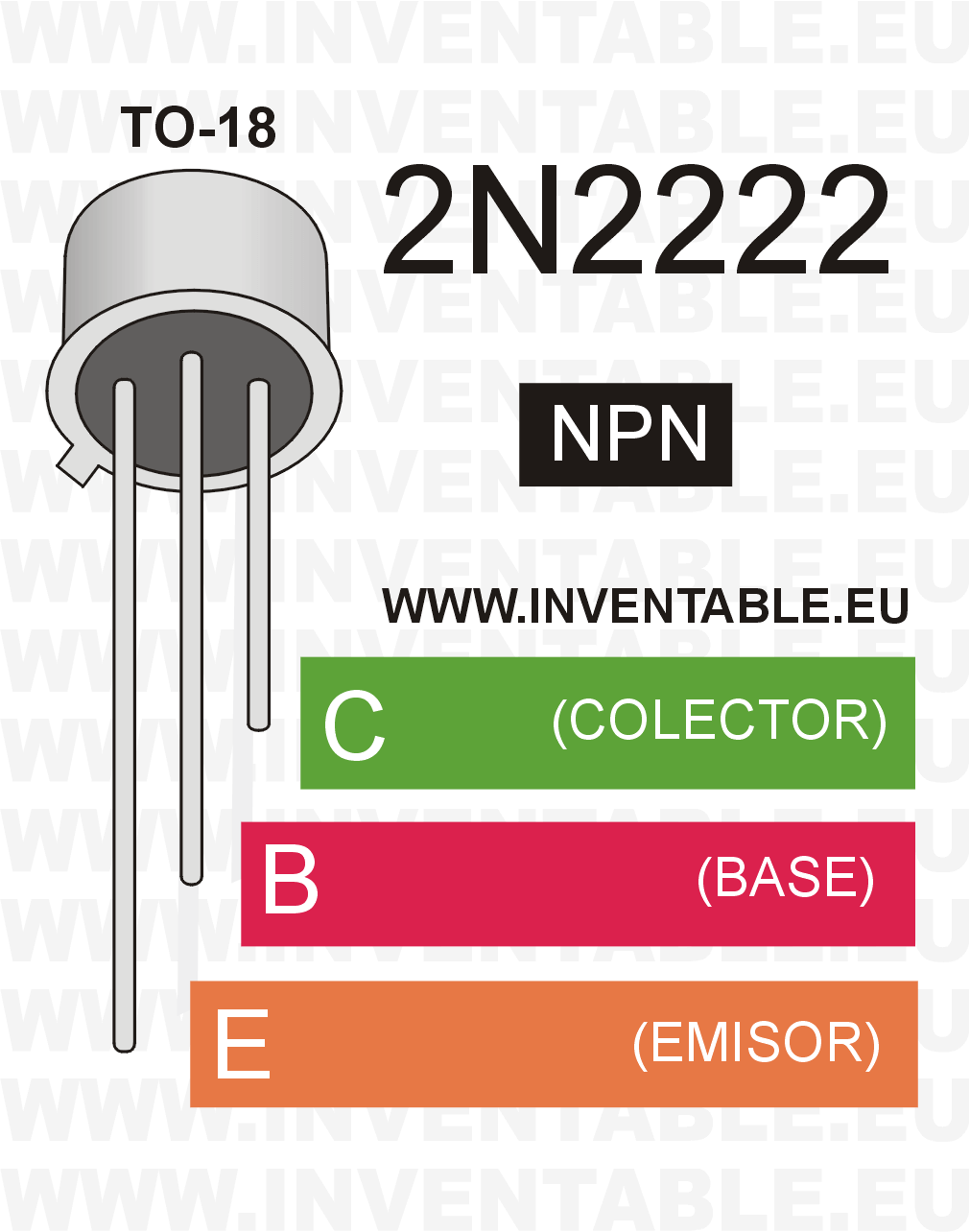
El 2N2222 es un famosísimo transistor bipolar NPN de uso general construido inicialmente por la Motorola en los años ’60 y todavía muy usado por su gran versatilidad.

Un multivibrador biestable o simplemente flip flop es un circuito electrónico que, en base a un impulso externo sobre una o más entradas de control, asume un estado…

Descripción técnica de los transistores bipolares para usos generales BC337 (NPN) y BC327 (PNP) con capacidad de corriente hasta de 800 mA, que les permite de ser usados en aplicaciones de control como drivers para pequeños motores, relés y también tiras de leds. También se verán los equivalentes SMD BC807 y BC817.

Transistor NPN de uso general, muy económico y con una buena capacidad de corriente de salida (0,8A máx.), que permite su uso para el control de relés,motores, tiras de leds y en pequeños amplificadores de audio.

El BC548 y sus hermanos de serie son transistores bipolares NPN para aplicaciones generales. En este artículo veremos sus principales características.

Proyecto de un controlador para ventilador o cooler activado por un sensor de temperatura y tiempo regulable. Hecho con solo 3 transistores.

Guía completa para construir un temporizador muy simple y de gran versatilidad, hecho con solo dos transistores y otros componentes pasivos.

Proyecto completo para la construcción de Calimaro, un robot didáctico hecho solo con transistores y materiales fáciles de conseguir. PARTE 4

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir. PARTE 3

El modo mas simple para activar un relé es con un transistor, generalmente del tipo NPN. La corriente de excitación de un relé depende del tipo de relé….

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir. PARTE 2

Proyecto de un intercomunicador hecho con transistores. En reposo no consume corriente y sirve solo un cable estéreo para los remotos.

Proyecto de un pequeño amplificador muy simple, hecho solo con solo 3 transistores y con una potencia de 1W.

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir.
Últimos comentarios
Alejandro Ballesteros Morales
"cara de huevo "
jose luis
"Hola. Necesito saber si este proyecto funciona igual con el TL074 Gracias "
gustavo quiroga
"excelente los proyectos y muy bueno los articulos didacticos, felicitaciones "
Diego
"Gracias por pasarte cada tanto por aquí. Yo seguiré entrando siempre. Saludos "
Diego
"Muchas gracias por el proyecto. Saludos "
Luz de cortesía con salida de potencia – Inventable
"[…] Hola gente. Les propongo una nueva versión de potencia de la luz ..."