


Categoría: tecnología

He construido este sistema para una muestra en la que se trata de antiguos métodos de comunicación (morse, semáforo, display alfanumérico)

Muchas válvulas termoiónicas permiten ser alimentadas con 6,3V o con 12,6V. En este breve post explico el motivo y también como conectarlas.

Para mi Elektor fue la mejor revista de electrónica, no solo por la calidad inigualable de los proyectos, sino también por su inconfundible estilo gráfico. En este post les cuento algo de su historia.

En este post hablaré de simuladores on-line para luz de escalera, combinaciones colores RGB, ordenadores MSX y de la Exposición GamePlay en Barcelona.

Segunda parte de la construcción del robot SAM-Z controlado por una Raspberry PI 3 que trata de la alimentación y del shutdown automático.

Celebrando el aniversario del robot SAM me dieron ganas de construir uno nuevo. Sería una óptima plataforma para experimentar nuevas tecnologías que podrían ser publicadas en Inventable durante…
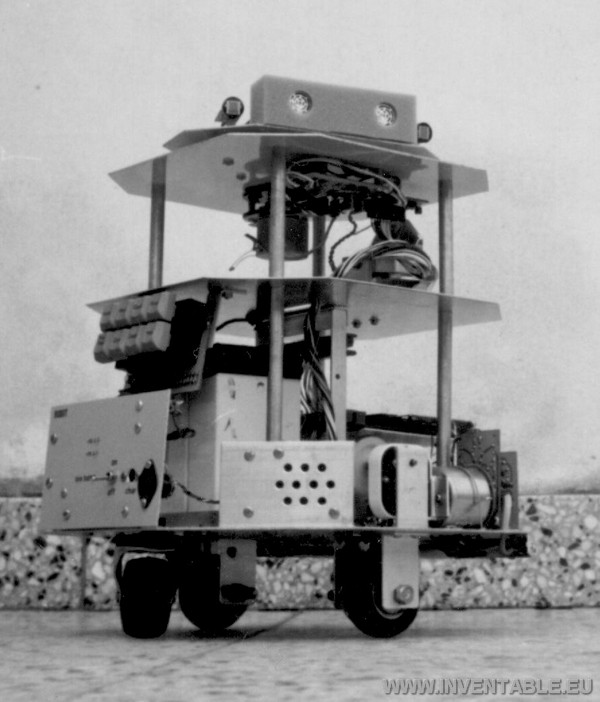
Breve historia del robot SAM, que he construido en el año 1989 y que sirvió como plataforma de desarrollo de sistemas electrónicos y técnicas de programación innovadoras.
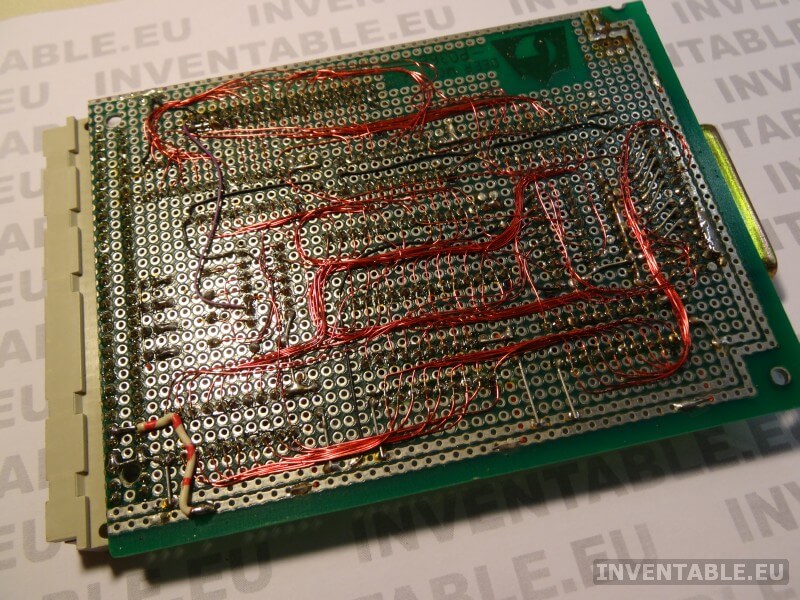
En este post se ilustran brevemente las distintas técnicas usadas en el pasado para la construcción de circuitos electrónicos.

Con el desarrollo y la difusión de la lógica a 3,3V en lugar de los clásicos 5V a veces nos encontramos con el problema de conectar dispositivos entre…

Proyecto de una máquina didáctica que he desarrollado para un museo italiano de ciencias y que demuestra el principio de los cuerpos en caída libre.

Las baterías tampón mantienen automáticamente la alimentación de un circuito cuando falta la energía eléctrica. Veamos como se conectan.

En este artículo describo como se leen los valores de las resistencias SMD (montaje superficial) en todas sus versiones, es decir, con códigos numéricos de 3 cifras, de 4 cifras y también de tipo alfanumérico (EIA-96).

Proyecto para la realización de una interfaz experimental muy sencilla con entradas, salidas y puertos seriales para Raspberry PI.

Descripción sintética del nuevo ordenador monotarjeta de bajo costo Raspberry PI, base de futuros proyectos.

En este artículo analizo como está hecha una muy económica y lámpara a led comercial y proponiendo otros modos de uso.

Análisis filosófico sobre las ventajas y las desventajas que tiene usar los módulos especializados de un microcontrolador (UART, SPI, I2C, ADC, etc.)
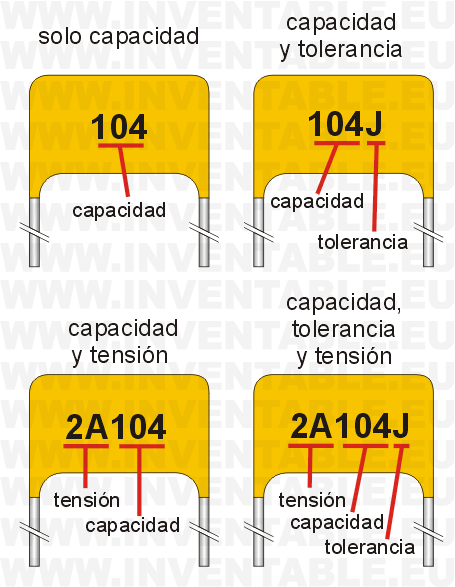
Guía que explica como leer el valor de los capacitores o condensadores electrónicos en base al texto escrito en el cuerpo del componente.

Como están hechas y como funcionan las linternas chinas con LEDs de bajo costo que se encuentran por todos lados.

Hola, para desmentir la frase «en casa de herrero, cuchillo de palo», después di muchos artículos que he publicado sobre el tema, presento informalmente algunas fotografías de la iluminación con LEDs que he hecho en mi estudio / laboratorio.

Como están hechas las tiras de LEDs RGB (RGB led trip). Veremos el circuito y algunos ejemplos de conexión y de uso.
Últimos comentarios
Alejandro Ballesteros Morales
"cara de huevo "
jose luis
"Hola. Necesito saber si este proyecto funciona igual con el TL074 Gracias "
gustavo quiroga
"excelente los proyectos y muy bueno los articulos didacticos, felicitaciones "
Diego
"Gracias por pasarte cada tanto por aquí. Yo seguiré entrando siempre. Saludos "
Diego
"Muchas gracias por el proyecto. Saludos "
Luz de cortesía con salida de potencia – Inventable
"[…] Hola gente. Les propongo una nueva versión de potencia de la luz ..."