



Categoría: robot

Temporizador (o timer) activado por micrófono y con salida relé. Es un circuito muy versátil que se puede usar en numerosas aplicaciones.

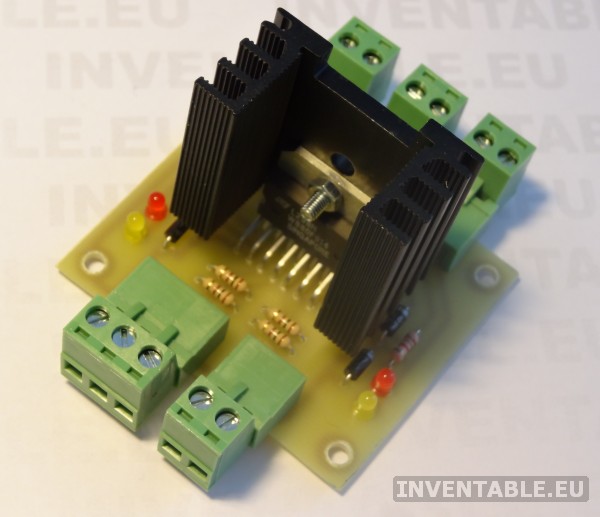
Driver compacto para dos motores DC, pensado para ser usado en un pequeño robot. Usa el circuito integrado L293D que está compuesto por dos puentes «H», bastante similar al L298 pero con el encapsulado de un integrado común (dual dip line) y menos potente del 298 (600mA max. por canal).

El circuito permite de accionar un pequeño motor DC en los dos sentidos de marcha según la posición de un potenciómetro. Usa dos integrados 555.

El perro robot de la fotografía es un misterio. No se sabe quien lo hizo. Lo encontró un filosofo norteamericano en un negocio de antigüedades de París. Veamos como está hecho.

Segunda parte de la construcción del robot SAM-Z controlado por una Raspberry PI 3 que trata de la alimentación y del shutdown automático.

Celebrando el aniversario del robot SAM me dieron ganas de construir uno nuevo. Sería una óptima plataforma para experimentar nuevas tecnologías que podrían ser publicadas en Inventable durante…
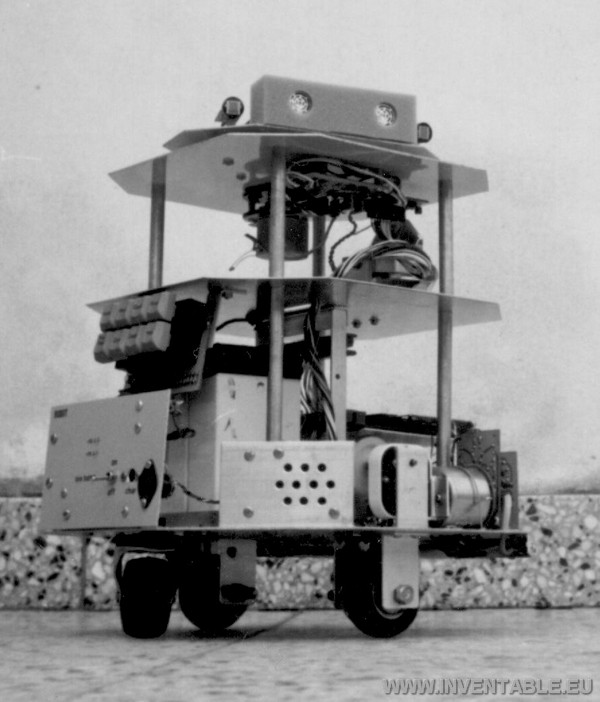
Breve historia del robot SAM, que he construido en el año 1989 y que sirvió como plataforma de desarrollo de sistemas electrónicos y técnicas de programación innovadoras.

Hola amigos, hoy quiero escribir sobre cyberneticzoo.com, pienso que el sitio más completo que existe en la red sobre la historia de los robots y de la cibernética…
Proyecto Open Source para la construcción de un driver para motores DC que usa el integrado L298. Ideal para robots.

En este post veremos detalladamente como funciona un puente «H», usado para controlar motores de corriente continua y de baja tensión.

Como construir un sensor IR de proximidad de bajo costo y alta calidad, con sensibilidad de algunos centímetros, ideal para robots móviles.

Proyecto DIY para la construcción de una pequeña unidad de potencia para motor paso a paso (step motor) con entradas fotoacopladas.

Proyecto DIY para la construcción de una pequeña unidad de potencia para motor paso a paso (step motor) con un solo circuito integrado.

Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. Se describirán problemas y soluciones de un sistema concreto de movimiento, analizando los distintos aspectos técnicos.

Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. Se describirán problemas y soluciones de un sistema concreto de movimiento, analizando los distintos aspectos relativos.

Proyecto completo para la construcción de Calimaro, un robot didáctico hecho solo con transistores y materiales fáciles de conseguir. PARTE 4

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir. PARTE 3

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir. PARTE 2

Proyecto completo para la construcción de un robot didáctico hecho solo con transistores y componentes fáciles de conseguir.
Últimos comentarios
CesarIII
"La ganancia del transistor depende de la corriente del colector y de la ..."
Aryan
"Em, no se como entrar al simulador en si… "
Luis
"Hola!, tengo pensado usar tu circuito de inversor de direccion de motor DC ..."
JC
"Ha intentado modificando un regulador step down XL4005? podría intentar con un arreglo ..."
Amaurilio Alencar
"Hellow, at first thanks for this circuit. Just one thing I did not underestand. ..."
Jorg Roj
"Muchas gracias; Aprendiendo mucho de vosotros "