



Etiqueta: Python

Segunda parte de la construcción del robot SAM-Z controlado por una Raspberry PI 3 que trata de la alimentación y del shutdown automático.

Celebrando el aniversario del robot SAM me dieron ganas de construir uno nuevo. Sería una óptima plataforma para experimentar nuevas tecnologías que podrían ser publicadas en Inventable durante…

Proyecto completo para la realización de un server web con Raspberry PI que permite de leer entradas y controlar relés desde un smartphone.
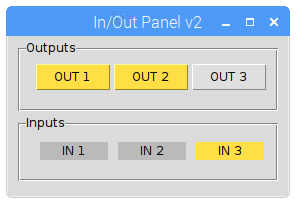
En esta segunda parte del proyecto desarrollaremos una nueva versión del programa que hemos visto en la primera parte. El aspecto gráfico de la interfaz es parecido a…

Proyecto completo para el control de entradas y salidas con relés de una Raspberry PI a través de un programa con interfaz gráfica escrito en Python.

Proyecto completo para controlar entradas y salidas de una Raspberry PI, conectando pulsadores y encendiendo leds con Python.
Últimos comentarios
jose luis
"Hola. Necesito saber si este proyecto funciona igual con el TL074 Gracias "
gustavo quiroga
"excelente los proyectos y muy bueno los articulos didacticos, felicitaciones "
Diego
"Gracias por pasarte cada tanto por aquí. Yo seguiré entrando siempre. Saludos "
Diego
"Muchas gracias por el proyecto. Saludos "
Luz de cortesía con salida de potencia – Inventable
"[…] Hola gente. Les propongo una nueva versión de potencia de la luz ..."
Eduardo
"Hola, Gabriel. Estoy en un simulador con tu circuito y el boton de ..."