



Categoría: proyectos diyPágina 1 de 5

Versión de potencia de la luz de cortesía con LEDs para casa, que enciende una tira de leds o una lámpara por un período de tiempo determinado, cuando apagamos la luz de la habitación.

Proyecto completo para la construcción de un semáforo con transistores que controla tiras de leds de 12V de buena potencia.

En este post veremos el proyecto de un sistema automático de control de temperatura muy simple que usa un ventilador y muy pocos componentes.

Tiempo atrás había publicado aquí un semáforo muy simple, hecho con solo 3 transistores. Ese circuito puede ser usado también como indicador de dirección o simplemente como intermitente. Veamos estos nuevos casos.

En este post propongo algunos circuitos para controlar un motor DC en ambos sentidos de marcha usando solamente un relé doble inversor y pulsadores o interruptores desviadores.

Proyecto de un sistema automático de refrigeración con un ventilador y solo 3 transistores, que usa un termistor NTC.
El proyecto de la figura es un timer muy simple, hecho con solo dos transistores de uso común y un relé de salida.
El circuito que les propongo es el de una célula fotoeléctrica muy simple, hecha con un LDR (resistencia sensible a la luz), dos transistores y un relé.

Temporizador (o timer) activado por micrófono y con salida relé. Es un circuito muy versátil que se puede usar en numerosas aplicaciones.

Driver compacto para dos motores DC, pensado para ser usado en un pequeño robot. Usa el circuito integrado L293D que está compuesto por dos puentes «H», bastante similar al L298 pero con el encapsulado de un integrado común (dual dip line) y menos potente del 298 (600mA max. por canal).

El circuito permite de accionar un pequeño motor DC en los dos sentidos de marcha según la posición de un potenciómetro. Usa dos integrados 555.
Proyecto de un semáforo muy simple hecho con solo 3 transistores comunes.

Proyecto de un QUIZMASTER modular simplificado al máximo, que tiene muchas ventajas respecto a otros proyectos similares.

Proyecto para la realización de un probador de cables audio estereo muy simple de hacer y que usa solo dos operacionales 741.

El siguiente proyecto es un circuito para controlar un servomotor de radiocontrol (RC) con un circuito integrado 555.

Después de 20 años he construido una segunda versión de este querido motor, que inauguró el blog Inventable. Aquí pueden verlo, con un video.

El versátil integrado 555 se presta no solo como temporizador o intermitente sino también como flip flop RS o Toggle, muy útiles para construir interruptores con autorretención que se usan en campo industrial. Veamos como usarlo con ejemplos prácticos.

Nueva versión del intermitente valvular «pura», es decir, sin transistor de salida y que enciende un par de leds.

Proyecto de un destellador estroboscópico para leds de potencia que trabaja con un circuito integrado 555 y un mosfet IRF530.
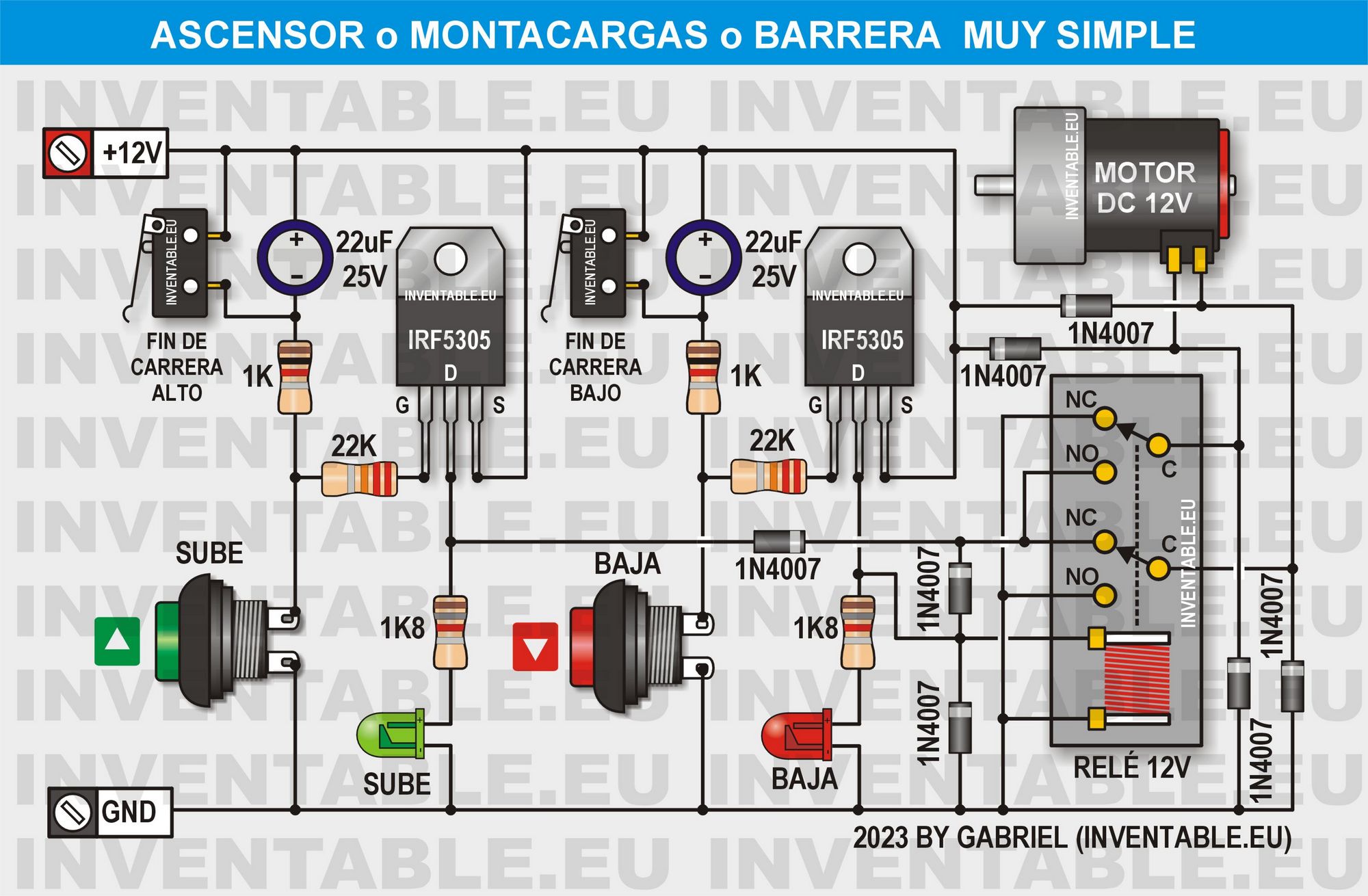
Circuito demostrativo didáctico muy simple que permite de controlar un ascensor o montacargas y también también un portón o una barrera.
Últimos comentarios
jose luis
"Hola. Necesito saber si este proyecto funciona igual con el TL074 Gracias "
gustavo quiroga
"excelente los proyectos y muy bueno los articulos didacticos, felicitaciones "
Diego
"Gracias por pasarte cada tanto por aquí. Yo seguiré entrando siempre. Saludos "
Diego
"Muchas gracias por el proyecto. Saludos "
Luz de cortesía con salida de potencia – Inventable
"[…] Hola gente. Les propongo una nueva versión de potencia de la luz ..."
Eduardo
"Hola, Gabriel. Estoy en un simulador con tu circuito y el boton de ..."