


Hola gente, en estos días quisiera celebrar los 30 años de SAM, un robot que construí en 1989, cuando todavía vivía en Argentina. Hoy en día, un robot como SAM no tiene nada de original, versiones mucho más elaboradas se pueden comprar en kit a muy bajo precio. Pero por ese entonces, ya conseguir dos motores iguales con respectivas cajas de engranajes era difícil. No niego que las partes mecánicas siempre fueron un obstáculo para mi, por falta de materiales, herramientas y conocimientos. De cualquier manera, me arreglé como pude. Además, los microcontroladores todavía no eran muy conocidos (el 68HC11 de Motorola estaba en el mercado desde hacía muy poco tiempo) y por lo tanto, era necesario usar un microprocesador que requería numerosos circuitos integrados periféricos para poder funcionar (memorias RAM y EPROM, puertos paralelos y seriales, ADC, etc.).

En fase de proyecto del robot me di cuenta que necesitaba de un sistema para poder programarlo y para poder comunicar con él. Por lo tanto, contemporáneamente al desarrollo del robot empecé a construir una plataforma electrónica de soporte. Consistía en un rack con 7 módulos extraibles que se conectaba a una pequeña computadora, al principio una ZX81 y después una MSX.

Los módulos del rack consistían en una fuente de alimentación de +5V y +-12V, un programador de memorias EPROM, un puerto serie (UART), 4 puertos paralelos de 8 bits cada uno y una tarjeta con un microprocesador para hacer pruebas. Tanto esta tarjeta de prueba, la computadora de control y el mismo robot usaban microprocesadores Z80 que yo en ese entonces conocía bastante bien. Recuerdo que el Z80 de la Zilog era uno de los mejores microprocesadores de 8 bits de todos los tiempos. Con un set de instrucciones impresionante fue usado en numerosas computadoras hogareñas como las ZX81, la Spectrum y toda la serie MSX. El Z80 fue inventado por el italiano Federico Faggin el cual inventó también el 8008 y el famoso 8080 que es el origen de los microprocesadores usados en las computadoras actualmente.

El lenguaje de programación que yo usaba era el assembly (conocido también como "código máquina"). Difícil de programar pero elección obligada en los años 80 para el desarrollo de juegos por la gran velocidad de ejecución y el poco espacio de memoria ocupado.

Un problema que tenía era como memorizar los programas en la computadora durante la fase de desarrollo que después serían "cargados" en la eprom del robot. Las "home computer" como la ZX81 o la MSX usaban grabadores con audiocassette para memorizar los programas. Era un sistema lento, incomodo y poco seguro.

Por estos motivos, encontré una solución medio rebuscada que consistía en mantener los datos en una memoria RAM alimentada por un par de pilas. Construí el módulo de memoria alojado en una caja para audiocassette con el formato de un cartucho estándar para juegos como pueden ver en la fotografía. Esta foto es actual: encontré el módulo abandonado en un cajón recientemente.

El módulo tenía dos circuitos integrados de memoria por un total de 32K, de los cuales 16K eran de EPROM donde estaban memorizados algunos programas de trabajo como por ejemplo el compilador y otros 16K de RAM donde alojaba el programa del robot.
Nunca me gustaron mucho las plaquetas universales con islas pero al mismo tiempo no disponía de la tecnología para hacer circuitos impresos de precisión. Por lo tanto, en ese entonces, adopté una técnica mixta que consistía en hacer circuitos impresos solo con las islas de los componentes mientras que las conexiones las hacía con un alambre esmaltado especial que se estañaba con el soldador.

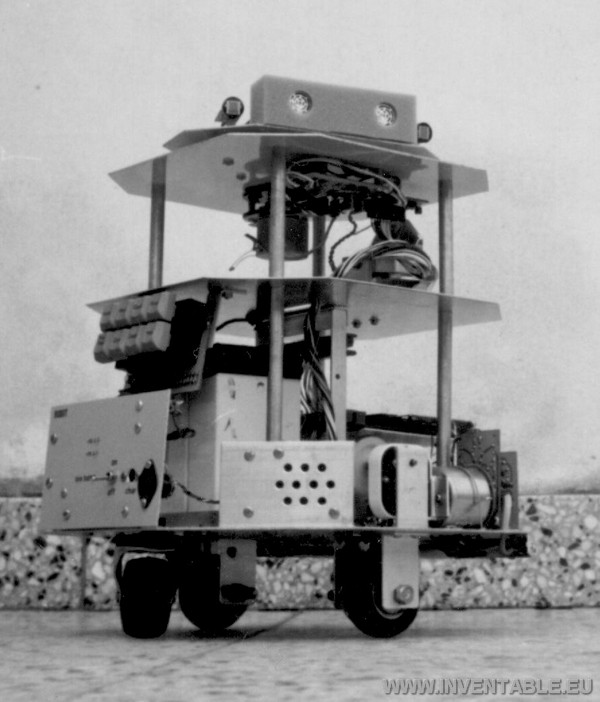
Volviendo al robot, como se puede ver en las fotografías, tenía una base octogonal de aluminio y otros dos pisos hechos también con lastras octogonales pero más pequeñas y sostenido todo por 4 tubos de aluminio en los cuales pasaban tornillos internos que mantenían la estructura firme. Casi toda la electrónica, motores y batería se encontraban en la parte baja mientras que en el piso intermedio estaba el sensor de movimiento PIR y en el piso más alto el telémetro giratorio a ultrasonidos.

En el piso intermedio había dejado espacio para poder agregar más electrónica y nuevos sensores. Una serie de emisores y receptores infrarrojos, puestos en el borde de la base octogonal servían como sistema de detección de obstáculos. Con otros leds infrarrojos i fototransistores leía el movimiento de las ruedas que usaba para conocer la distancia y la velocidad de movimiento del robot.

Este robot era un sistema en constante desarrollo, con el cual he experimentado distintas ideas. Desarrollé un sistema operativo multi-task con uso de máquinas de estados finitos y zonas de memoria compartidas.

Hice programas que servían para reconocimiento de los ambientes en los que se encontraba (con el telémetro a ultrasonidos), memorizaba un recorrido efectuado y lo repetía, seguí una fuente de luz o de sonido, etc. La experiencia de este proyecto me sirvió probablemente para desarrollar mi actual profesión.
Cuando viajé en Italia, el robot quedó en Argentina, en la casa de unos parientes. Algunos años después, entraron a robar y se lo llevaron. Me quedaron solo las fotos que están viendo, algunos planos y el recuerdo de otros tiempos.
Un abrazo grande para Héctor, Juan y Lucas!
Hasta pronto. 🙂
Gabriel
Vega
¡Buenísimo! ¡Qué épocas! Por entonces no había empezado todavía a usar micros, y cuando lo hice, también empecé con un Z80.
El robot está muy bueno y muy elaborado: te felicito. Se te extrañaba por acá 🙂
Un abrazo para vos también.
Juan
Lucas Martín
Hola! Impresionante el desarrollo y la documentación de la época. Saludos desde Mar del!
Anónimo
Buenísimo. Sería bueno que muestre un video de su funcionamiento.
adeluna100
Fabuloso, que tiempos aquellos, la experiencia adquirida fue fenomenal, y la grandeza de SAM también, y hay una distancia de la tierra al cielo, sobre el proceso de creación de SAM, mientras armaste y pensaste en hacerlo realidad con lo que había en ese entonces, hoy se compra y se arma, sin conocer su esencia.
Muchas gracias por compartir tu experiencia y conocimientos, y para SAM esté donde esté MUCHAS FELICIDADES.
ADOLFO
Felicitaciones, sorprendente!!!
desde Venado Tuerto, Santa Fe, ARGENTINA.
wiliam ayola
ojala yo hubiese hecho algo asi hace 30 años estaba con las robots perdiendo mucho tiempo que jamas recupere
es ingenioso pocas personas lastinas tienen ese ingenio y no es que sea racista pero es la verdad
te felicito por tu perseverancia en lo que haces , bendiciones
Oscar
Muy bueno, te felicito!!!, todo construido con las computadoras mas populares que teniamos en ese momento en Argentina, parece salido de una película de los 50, para cuando una guia, se están extrañando.
Saludos desde Venado Tuerto (Sta. Fe), Argentina.
Emílio
Incrível!!!!
So um génio enfrenta e vence tamanha dificuldade como as daquela época.
Muitos parabéns e muito obrigado por tudo que fazes pela ciência ate hoje.
HJ
Espectacular !!! la verdad que desarrollar este tipo de «inventos» en esa época era sumamente difícil, ya que no existía la internet y el acceso a bibliografía era bien escasa.
No conocía este desarrollo tuyo Gabriel y te felicito.
Una lástima haberlo perdido, pero quedan las fotos y el conocimiento que te dio el haberlo realizado.
Que bueno que vuelvas a publicar!!!
Un abrazo
HJ
nelson
que bueno q sigas publicando articulos aca!! se te extraña
inventable
Muchas gracias por los comentarios y por vuestro afecto. Trataré nuevamente de publicar. Me volvieron las ganas de construir un robot, usando conceptos ya publicados en Inventable y también nueva tecnología. Podría ser una buena justificación para nuevos artículos ¿que piensan? 🙂
Vega
Hola Gabriel: personalmente me encantaría, pero me parece un poco avanzado. La idea daría más para una especie de foro en el que los participantes puedan colaborar con el desarrollo. Es mi humilde opinión, por supuesto. Si de todas formas lo hacés, intentaré colaborar en lo que pueda.
Un abrazo
Juan
Harry CacHarrytos
¡¡Impresionante!! Menudo trabajo de I+D para la época. Quién sabe, quizás el que lo robó fue quien creó la «Roomba» años más tarde…
inventable
jajajajaja, muy bueno Harry!!
Daniel Goldberg
Un gran laburo. En esa época nos rebuscábamos como se podía, me pareció ver un par de cajas de reducción de Rasti, Las cosas que uno hacía con los Z80….
Saludos!!!
inventable
jaja si tenés razón Daniel, eran reductores de Rasti 🙂
Gabriel
Raico
Wow impresionante, me encantan este tipo de publicaciones, no soy un especialista en electrónica pero me gusta ver proyectos y desarrollos DIY como este. Sigue publicando este tipo de cosas que inspiras y ayudas a mucha gente. Felicitaciones por el trabajo de todas tus publicaciones (ya he visto entradas antiguas como las del 2013), y en particular por el esfuerzo y creatividad de este proyecto robótico con tecnología y recursos de hace casi 40 años. Un saludo desde Venezuela.
Oscar Godenzi
Muy interesante Gabriel por tu inventiva y capacidad de desarollo allá por 1990, realmente no conocía tu desarrollo, pese a que fuimos compañeros de secundaria luego te perdí el rastro. Una lastima el final. Te felicito por la historia compartida.